| Главная » Статьи » Компьютеры » ОТУ |
Типовая структура замкнутой АСУ
Типовая структурная схема замкнутой АСУ представлена на рисунке 4.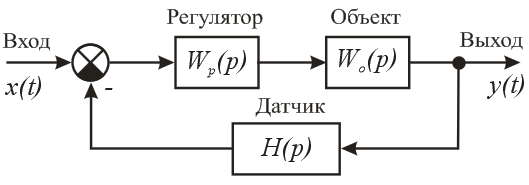 Рисунок 4. Замкнутая система управления
Объект – это физическая система или процесс, подлежащие управлению, вместе с усилителями мощности, исполнительными устройствами, редукторами и т.д. Датчик – это прибор, который измеряет выходной сигнал системы и преобразует его в сигнал соответствующей природы, подаваемый на сумматор. Регулятор – это динамическая система, целенаправленно вводимая в контур, чтобы придать замкнутой системе желаемые свойства. Передаточная функция системы имеет вид  , ,
где  – передаточная функция замкнутой системы; – передаточная функция замкнутой системы;  – передаточная функция регулятора; – передаточная функция регулятора;
 – передаточная функция объекта регулирования; – передаточная функция объекта регулирования;
 – передаточная функция цепи обратной связи. – передаточная функция цепи обратной связи. Обычно датчик обладает намного меньшей инерционностью по сравнению с объектом. Иначе говоря, полоса пропускания датчика много больше полосы пропускания объекта. Поэтому датчик может быть смоделирован в виде идеального коэффициента усиления, который обозначим  . Если считать датчик чистым коэффициентом усиления, то передаточная функция сводится к следующему виду . Если считать датчик чистым коэффициентом усиления, то передаточная функция сводится к следующему виду
 (3.1) (3.1)
Для любой системы с одним входом и одним выходом справедливо следующее: - система имеет переменную  , которой необходимо управлять (например температура воды, скорость вращения двигателя, и т. д.). Ее называют регулируемой переменной, или выходом системы; , которой необходимо управлять (например температура воды, скорость вращения двигателя, и т. д.). Ее называют регулируемой переменной, или выходом системы;
- система имеет входную переменную, или вход  , величина которой определяет желаемое значение выхода системы , величина которой определяет желаемое значение выхода системы  ; ;
- разность между желаемым значением и его действительным значением есть ошибка системы  ; ;
- выход сумматора на рисунке 4 есть сигнал отклонения, так как он несет информацию о реакции объекта. Ошибка системы не является внутренним сигналом этой системы. В общем случае вход системы – это не то же самое, что и желаемый выход системы .
Система с единичной обратной связью – это система, в которой коэффициент усиления в цепи обратной связи равен единице. Для системы с единичной обратной связью всегда справедливо следующее: - размерность входа  совпадает с размерностью выхода совпадает с размерностью выхода  ; ;
- входной сигнал  одновременно является желаемым значением выхода одновременно является желаемым значением выхода  ; ;
- следовательно, ошибка системы есть не что иное, как сигнал отклонения (рисунок 5) .  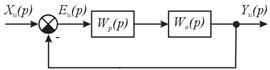 Рисунок 5. Система управления с единичной обратной связью
Если датчик можно представить в виде простым коэффициента усиления, то структурная схема на рисунке 4 сводится к эквивалентной схеме с единичной обратной связью на рисунке 6.  Рисунок 6. Эквивалентная схема системы управления с единичной обратной связью
Рисунок 6. Эквивалентная схема системы управления с единичной обратной связью Следует обратить внимание, что передаточная функция системы на рисунке 6 соответствует выражению (3.1). В этом случае передаточная функция прямой цепи равна  , а входом системы с единичной обратной связью является , а входом системы с единичной обратной связью является  . Значит, если за вход принять как . Значит, если за вход принять как  , то система может быть представлена в виде схемы на рисунке 5. , то система может быть представлена в виде схемы на рисунке 5. Эта схема называется моделью с единичной обратной связью, для которой справедливы следующие предположения: - датчик может рассматриваться как идеальный коэффициент усиления; - эквивалентная передаточная функция прямой цепи равна  ; ;
- входом модели с единичной обратной связью  , является вход реальной системы, умноженный на , является вход реальной системы, умноженный на  . .
Результат этих действий заключается в том, что в преобразованной модели входной сигнал , подаваемый на сумматор, имеет ту же размерность, что и выходной сигнал системы. В реальной же системе входной сигнал всегда имеет размерность выходного сигнала датчика.
Источник: Типовая структура замкнутой АСУ | |
| Просмотров: 2636 | Теги: | Рейтинг: 2.0/1 |
| Всего комментариев: 0 | |